local length = 10 local height = 10 local Grid = {} for i = 1, length do Grid[i] = {} for k = 1, height do local t = {} t.x = i t.y = k t.f = 0 t.g = 0 t.h = 0 t.print = string.format("[%s, %s]", i, k) t.__tostring = function() print("[%s, %s]", i, k) end Grid[i][k] = t end end
x,y是坐标
f,g,h是每个给子对应我们F=G+H
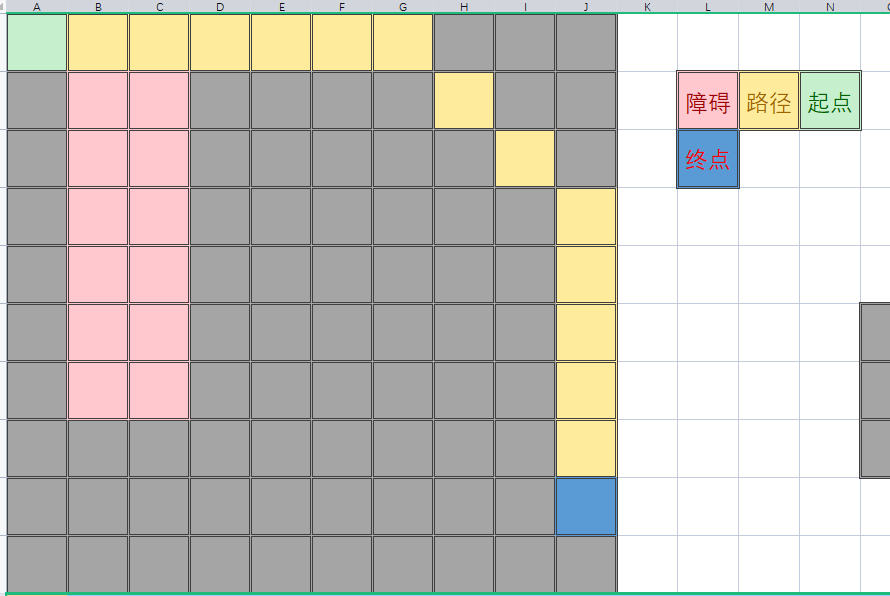
添加障碍
1 2 3 4 5 6 7 8
--添加障碍 local Obstacles = {} for i = 2, 3do Obstacles[i] = {} for k = 2, 7do Obstacles[i][k] = Grid[i][k] end end
---GetAreaPoint ---@param x number 当前点的x ---@param y number 当前点的y ---@param endPoint table 目标点 ---@param length number ---@param height number localfunctionGetAreaPoint(x, y, endPoint, length, height) local x1 = x local y1 = y local start = Grid[x][y] local openList = {}
--region 检查边界 if y1 - 1 >= 1then openList[#openList + 1] = Grid[x1][y1 - 1] end
if y1 + 1 <= height then openList[#openList + 1] = Grid[x1][y1 + 1] end
if x1 - 1 >= 1then openList[#openList + 1] = Grid[x1 - 1][y1] end
if x1 + 1 <= length then openList[#openList + 1] = Grid[x1 + 1][y1] end
if x1 + 1 <= length and y1 - 1 >= 1then openList[#openList + 1] = Grid[x1 + 1][y1 - 1] end
if x1 - 1 >= 1and y1 + 1 <= height then openList[#openList + 1] = Grid[x1 - 1][y1 + 1] end
if x1 + 1 <= length and y1 + 1 <= height then openList[#openList + 1] = Grid[x1 + 1][y1 + 1] end
--endregion
--region 检查障碍 for i, v inpairs(openList) do if Obstacles[v.x] and Obstacles[v.x][v.y] then openList[i] = nil end end --endregion
--核心逻辑 for _, v inpairs(openList) do if v.x ~= start.x or v.y ~= start.y then v.g = math.sqrt(math.pow(math.abs(v.x - start.x), 2) + math.pow(math.abs(v.y - start.y), 2)) v.g = math.floor(v.g * 10) / 10 else v.g = math.abs(v.x - start.x) + math.abs(v.y - start.y) end
v.h = math.abs(v.x - endPoint.x) + math.abs(v.y - endPoint.y) v.f = v.g + v.h end print("--------------------------------") for _, v inpairs(openList) do print("周围点", v.print, v.f, v.g, v.h) end print("--------------------------------") --找到最合适的点 local perfect for _, v inpairs(openList) do ifnot perfect then perfect = v else if perfect.f > v.f then perfect = v end end end return perfect end
--找到最合适的点 local perfect for _, v inpairs(openList) do ifnot perfect then perfect = v else if perfect.f > v.f then perfect = v end end end return perfect
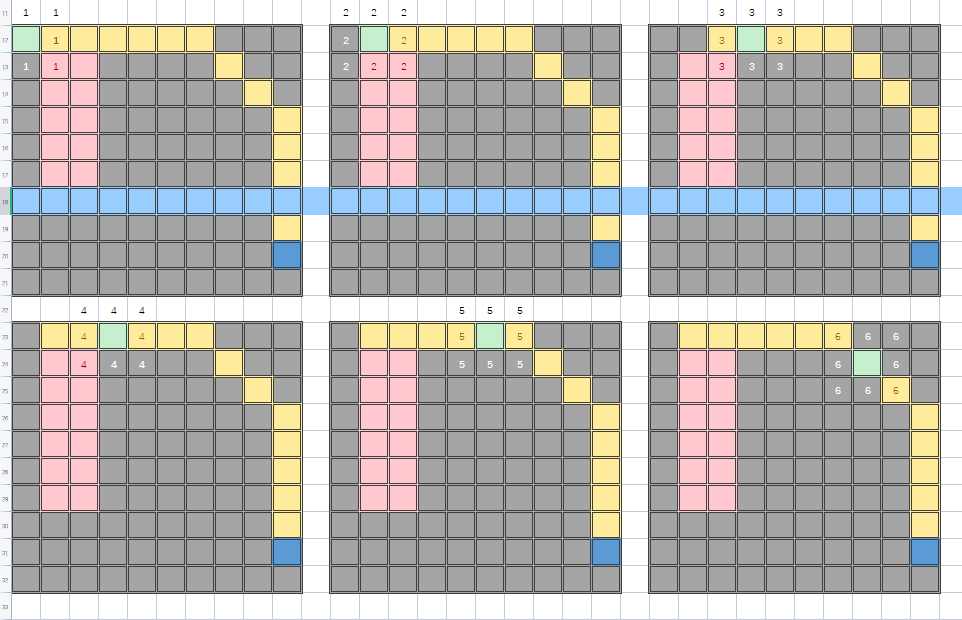
拿到最优的点。
调试代码
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19
----------------------------------main---------------------------------------------------------------------------------- local startPoint = Grid[1][1] local endPoint = Grid[9][10] local perfect = startPoint local x1 = os.clock() localpath = {} while perfect.x ~= endPoint.x and perfect.y ~= endPoint.y do perfect = GetAreaPoint(perfect.x, perfect.y, endPoint, length, height) print("最优点", perfect.print) path[#path + 1] = perfect end print("------------------------------") path[#path + 1] = endPoint for _, v inpairs(path) do print(v.print) end local x2 = os.clock()